Introduction
In project 4, my partner Natasha and I took on the task of building a Phoenix Hand, an e-NABLE prosthesis, at 150% scale. Our objective was not only to assemble the hand but also to explore and reflect on the assembly process, especially in terms of documentation and resource organization. This project presented a different set of challenges and opportunities compared to our previous assignments. In this reflection, I will walk you through our experience, from navigating e-NABLE resources to building and enhancing the prosthetic hand.
Accessing Resources and Slicing
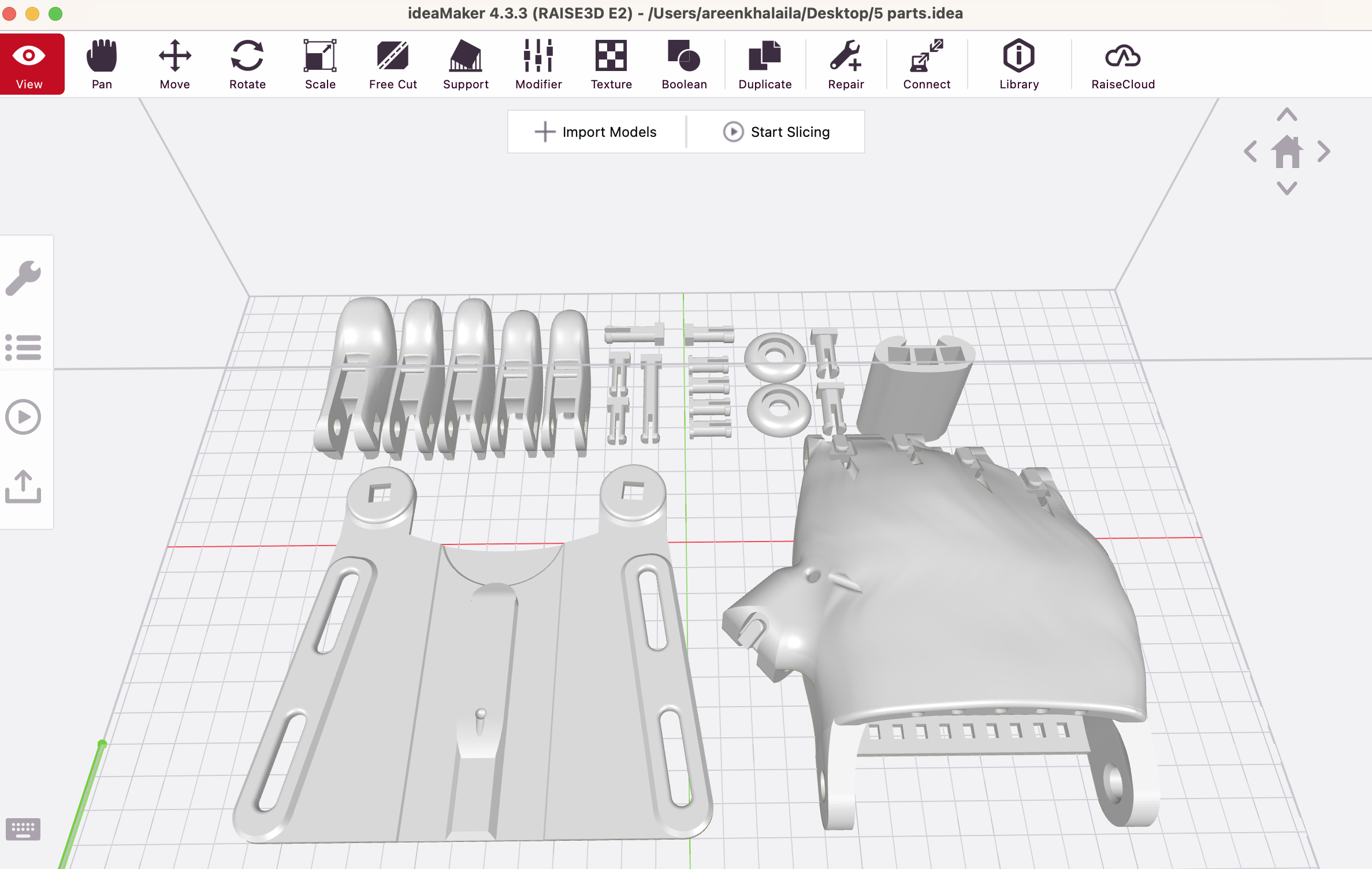
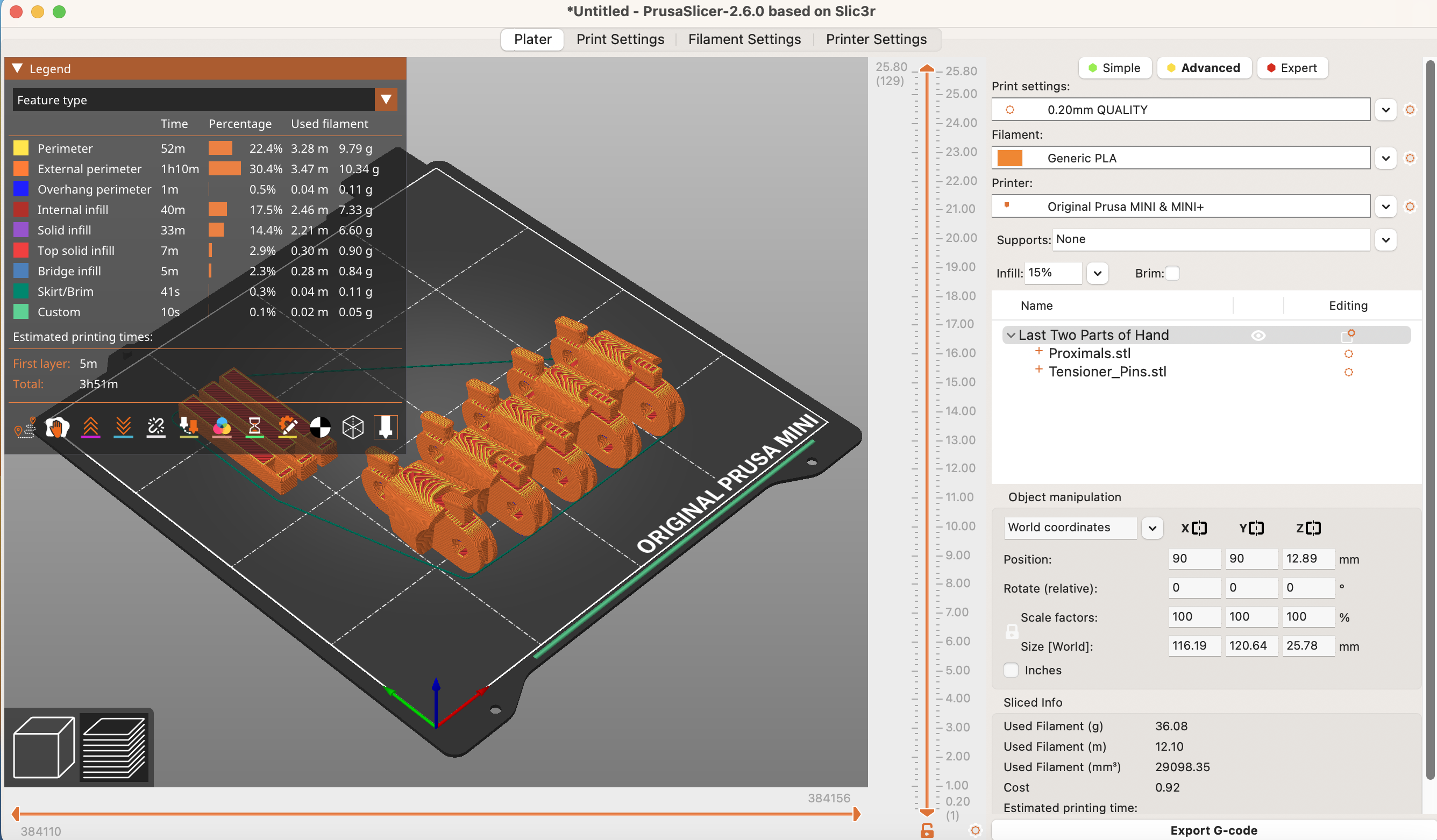
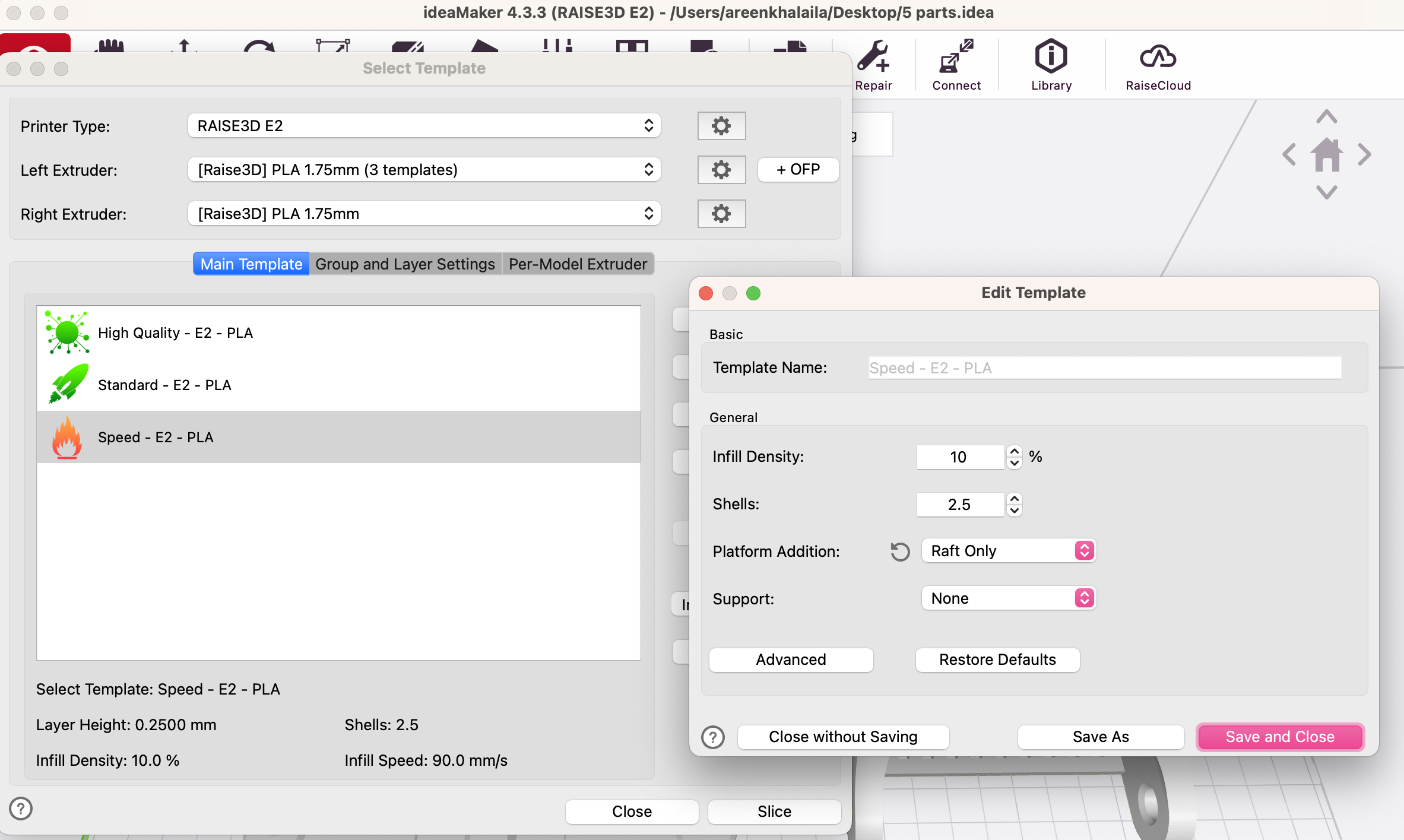
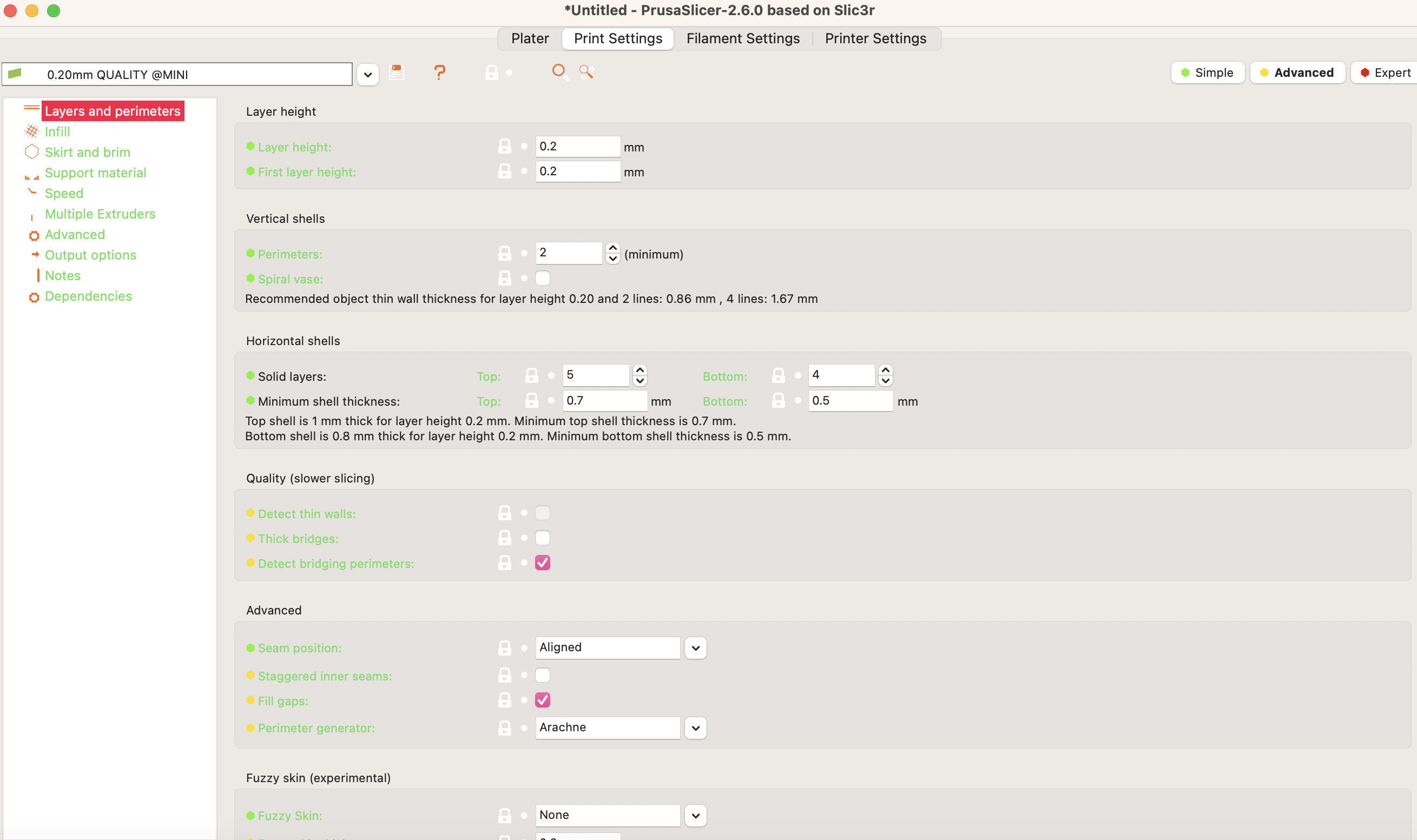
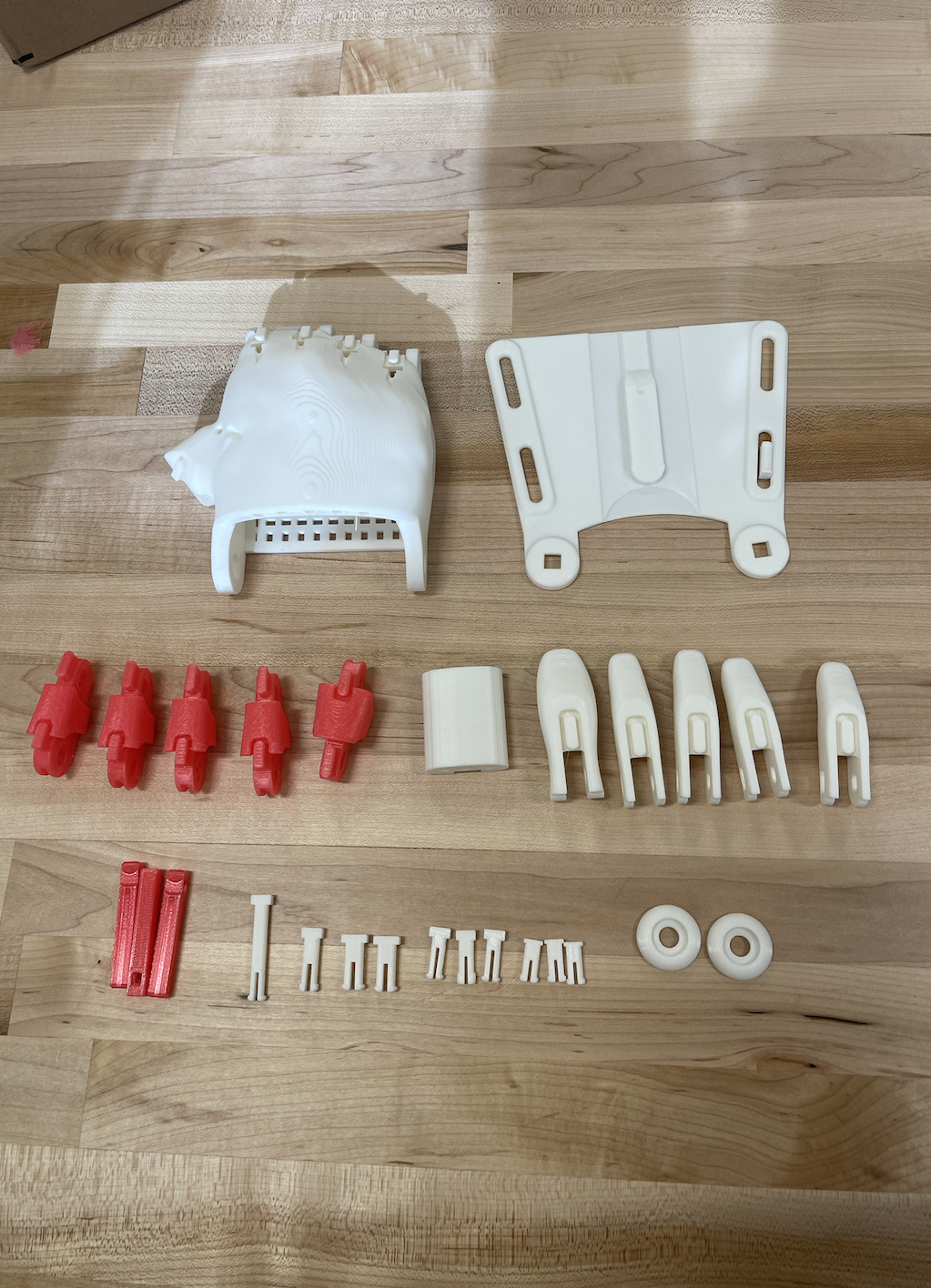
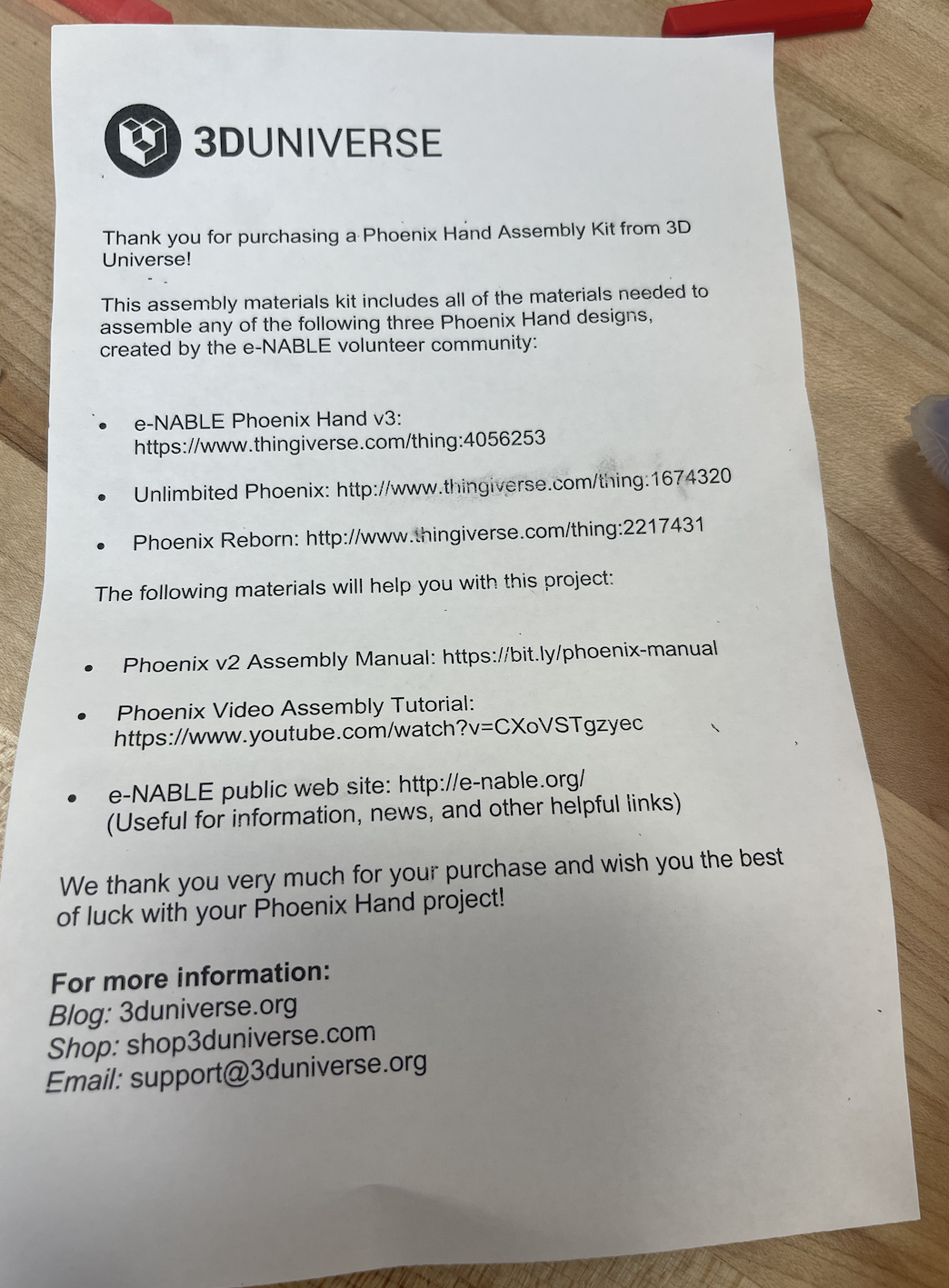
To begin, we registered on the e-NABLE hub and reviewed the resources available for the Phoenix Hand V3. We also explored related materials on the NIH 3D Print Exchange. We downloaded the UnLimbited Phoenix Hand and prepared the print by slicing two subsets of hand components at 150% scale using IdeaMaker Slicer for the Raise3D printers and PrusaSlicer for the Prusa Mini printers.
3D Printing Process
The 3D printing process was divided into two parts, with some components printed on the Raise3D printers and others on the Prusa Mini. The prints produced on the Raise3D printers turned out to be of higher quality compared to the Prusa Mini, which was an interesting observation. We kept the dafault values of the print settings for the Prusa Mini print.
The 3D printing phase involved significant time, with the proximals and tensioner pins taking about 4 hours, while the remaining components required approximately 22.5 hours. Our approach to the raft-only printing platform addition contributed to this duration. Despite the extended print time, the process was manageable when spread across multiple printers.
Assembly Process
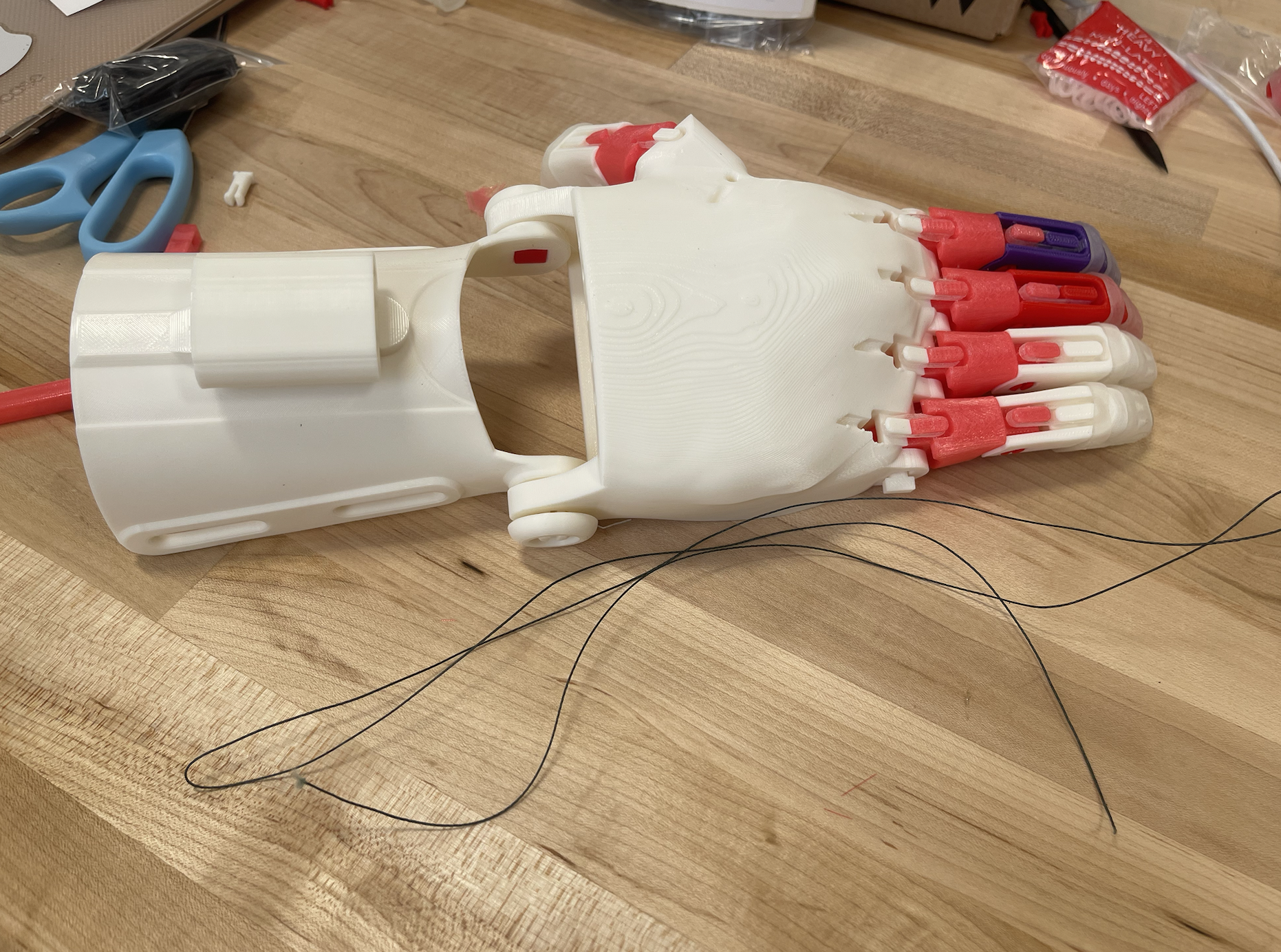
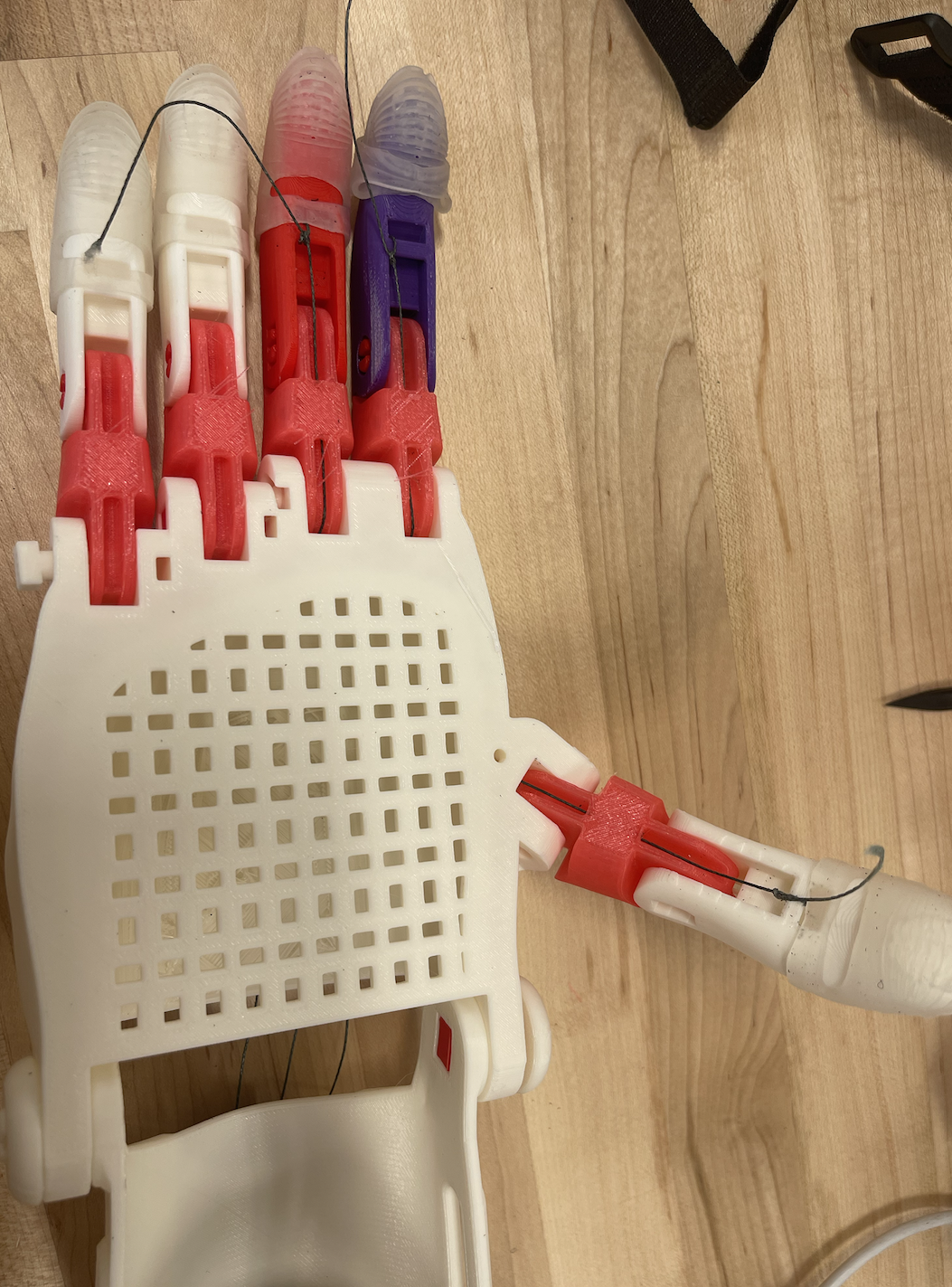
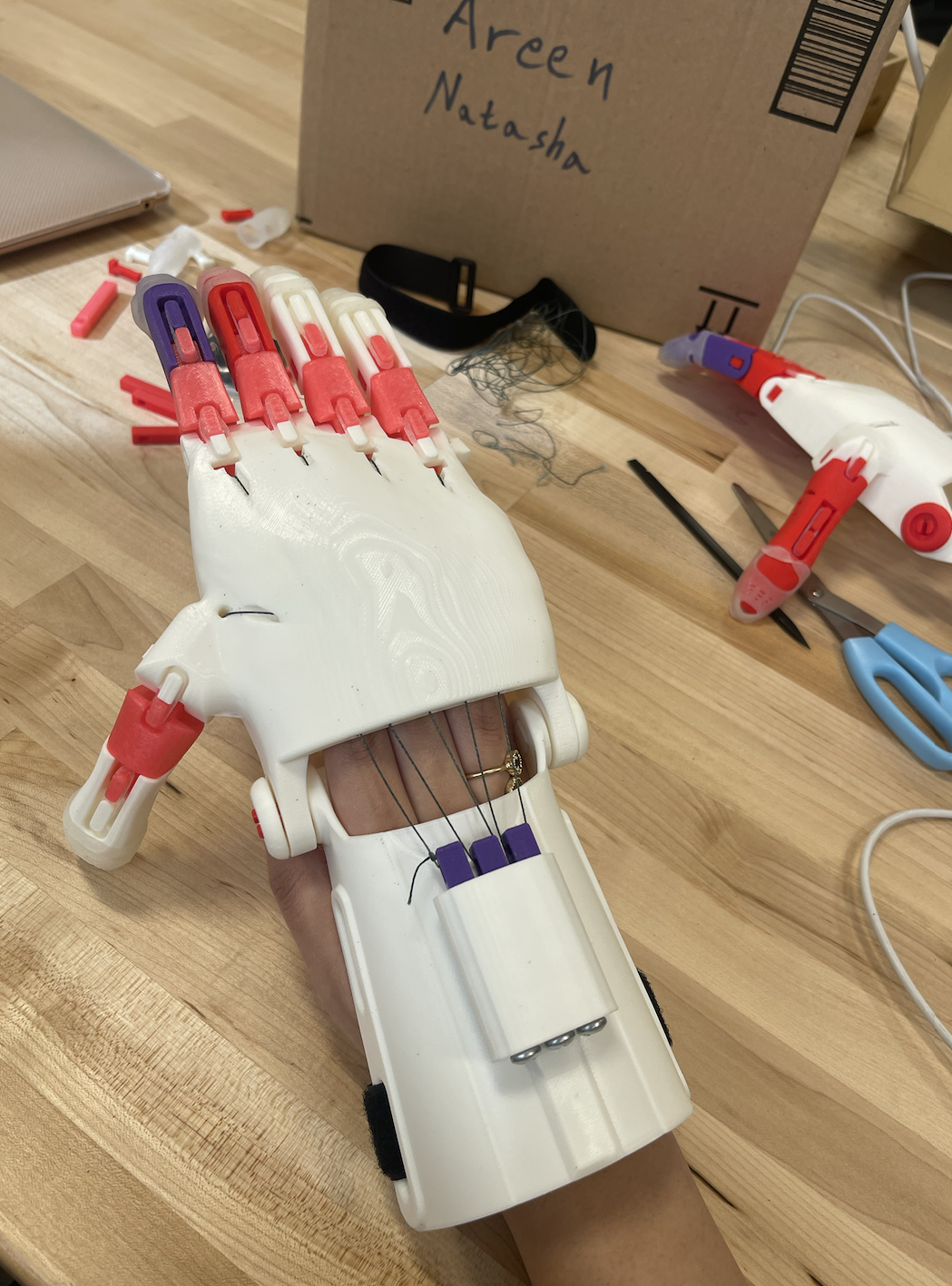
Once the components were successfully printed, we followed the assembly guides at our disposal. With the guidance of our TA, we used a heat gun to melt down the arm guard component. To piece the hand together, we utilized the printed pins, which came in various sizes, and the rubber bands included in the supplied parts Kit from 3D Universe. A key aspect of the assembly involved cutting three strings—one dedicated to the thumb, another serving the index and middle fingers, and the third designated for the ring finger and pinky. Tying knots from the fingertips to the printed Tensioner Pins, we methodically constructed the prosthetic hand.
Our assembly journey was guided by two types of documentation: a video tutorial and a written assembly manual. Contrasting these two forms of guidance allowed us to assess their effectiveness. While the video was comprehensive, we found it challenging to locate specific instructions within its length. The assembly manual, on the other hand, was more accessible and easier to navigate. However, a slight inconsistency between the manual and the assembled hand demonstrated in class led to some confusion. Clearer instructions on how to knot the strings and attach components could have been beneficial.
Documenting Difficulties
Building the Phoenix Hand presented its share of challenges. Key difficulties included aligning the strings and knots for optimal tension in the fingers, as well as some confusion arising from slight discrepancies between the assembly manual and the hand demonstrated in class. Additionally, the assembly tutorial video, while informative, was lengthy and challenging to navigate. Managing the extensive print time required for the 3D components also posed logistical challenges.
Enhancing Functionality
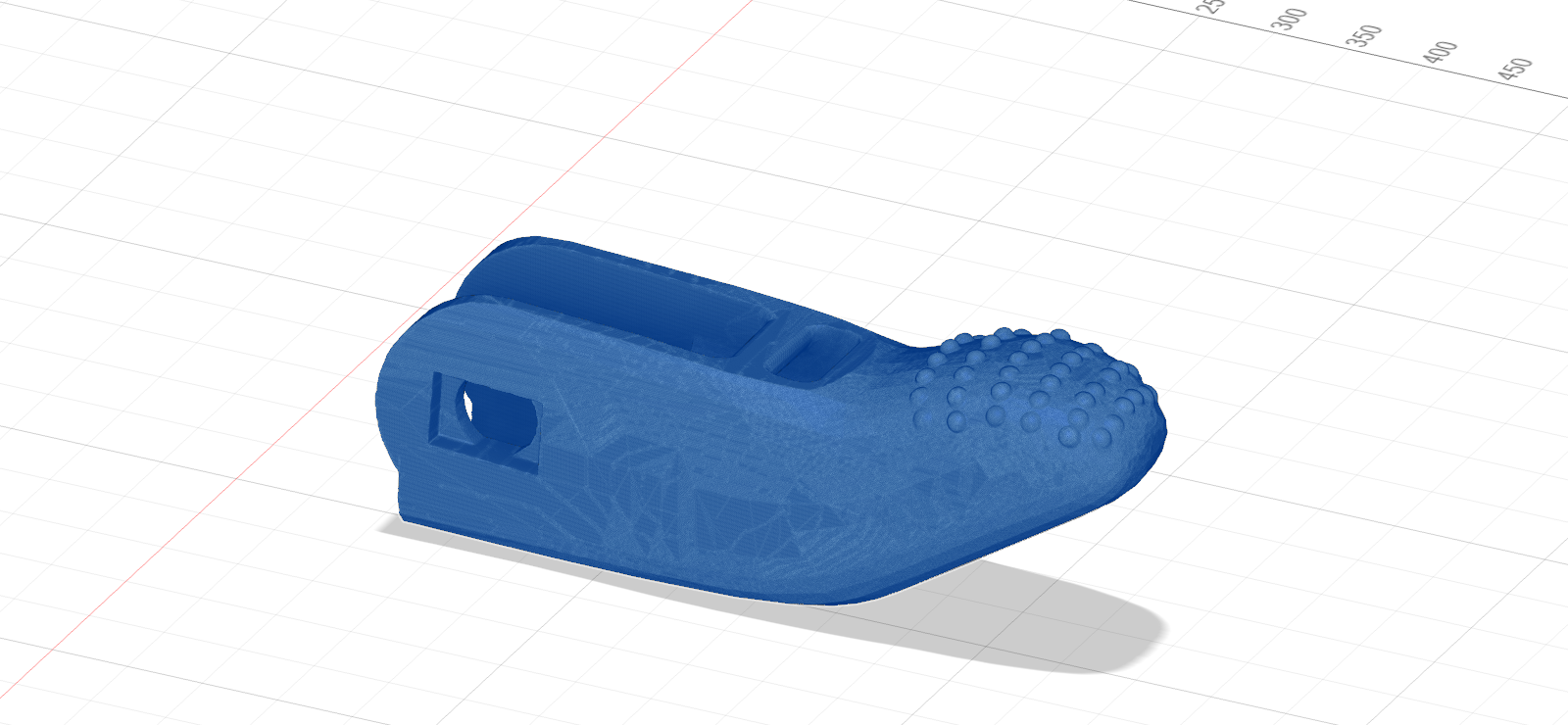
To improve the Phoenix Hand's functionality, I decided to add small bumps to the fingers, enhancing the hand's grip for more secure object manipulation, especially in tasks requiring fine motor control. I accomplished this in Fusion 360 by sketching and extruding the bump shapes on the finger surfaces. The modifications ensure that the bumps don't hinder the hand's overall functionality.
Conclusion
Project 4 allowed us to gain hands-on experience in building a prosthetic hand and explore the challenges and strengths of available assembly documentation. It reinforced the importance of clear and accessible instructions for successful assembly and highlighted the potential for creative modifications to cater to users' specific needs.






{kind=link}